近日,成人综艺
成人综艺
黄攀峰教授课题组在事件相机多源异步融合技术领域取得重要进展。相关研究成果以“AsynEIO: Asynchronous Monocular Event-Inertial Odometry Using Gaussian Process Regression”为题发表于机器人领域顶级期刊《IEEE Transactions on Robotics》(T-RO)。成人综艺
为论文的唯一作者单位,学生作者包括王志祥、李旭东,教师作者包括张夷斋、张帆、黄攀峰。其中,张夷斋教授为通讯作者。
本论文思想源自国家重点研发计划项目《大跨度桥梁检测作业机器人》应用中对大光照变换剧烈场景无人机自主导航需求,尝试利用新的传感器技术解决工程中的实际问题。事件相机(Event Camera)是一种新型神经拟态传感器,相比于传统灰度相机,具有低功耗、高动态范围、高时间分辨率、异步触发等特点,近年来受到学界的广泛关注与研究。现有研究表明,事件相机在与惯性元件结合使用时,展现出了其在高速运动和低光照环境中估计机器人运动状态的巨大潜力。
文章设计了一种异步事件-惯性融合系统,利用一个统一的高斯过程回归(GP Regression)框架来实现事件数据和惯性测量的异步融合,实现机器人在高动态范围、高速和激进运动场景中运动轨迹的高精度估计,克服了现有方法对事件相机异步特性考虑不足的问题;文章在统一的高斯过程回归框架下,提出并验证了2种新型事件-惯性异步融合机制(GPP和GPIF,如图1所示上)及其变种(GPP*、Preint、Extpreint,如图1下),在仿真数据和真实数据实验上,对比分析了不同方法的优缺点和特性,讨论并给出了实际应用中的有用建议。

图1 异步融合机制(上)及其因子图(下)
所设计的融合系统集成了一个异步事件驱动前端(Asynchronous Event-Driven Front-End,如图2左),允许从原始异步事件流中追踪高时间分辨率特征轨迹(Feature Trajectory,如图2右)。追踪到的特征轨迹与不同类型的惯性因子一起集成到统一的高斯过程回归框架中实现异步融合状态估计。在后端,利用解析推导的残差雅可比与噪声模型,构建了一个支持迭代优化和动态剪枝的滑动窗口优化器来实现估计问题的最终求解。
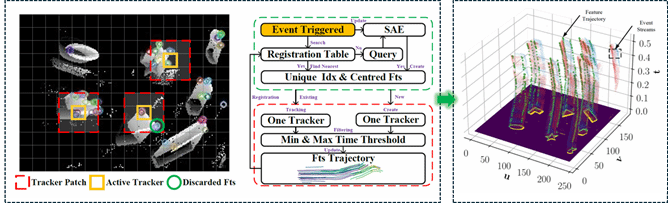
图2 异步事件驱动前端及追踪结果
在公开数据集和自建数据(如图3所示)上的实验结果表明,该文章所提方法和系统相比于现存方法具有优越性,特别是在高速、高机动、高动态范围及低光照场景中表现优异(如图4)。
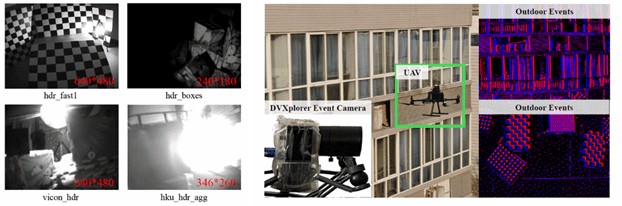
图3 公开数据集及自建数据集场景
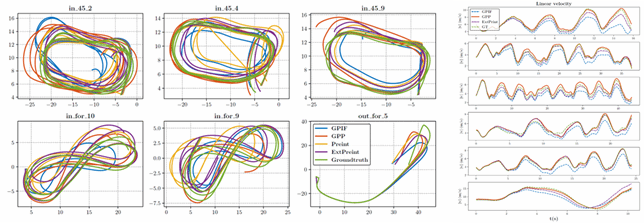
图4 高速场景下轨迹及线速度估计结果
《IEEE Transactions on Robotics》是IEEE机器人与自动化学会的旗舰期刊,被公认为是国际机器人学领域的顶级期刊。该期刊致力于发表具有重要理论突破或创新性应用的高质量研究成果,是衡量全球各大高校机器人学术水平的重要标志。该期刊每年发文量约200篇,其中包含国内作者或单位的论文约有50篇,其发表的文章通常具有前瞻性,涵盖了机器人学的核心问题及其在各类复杂环境中的应用,推动了全球机器人技术的持续发展。
近年来,黄攀峰教授带领课题组围绕智能空间机器人技术、机器人遥操作技术、航天器智能控制、人机混合智能、自主智能技术开展研究,承担军口国家级重大纵向、基金委重大仪器项目、重点类项目、杰青项目、优青项目、面上项目等50余项;已在IEEE T-RO、IJRR、IEEE/ASME TMECH、IEEE TCST、IEEE TCYB、IEEE TASE、IEEE TNNLS、IEEE TSMC、IEEE RA-L、ICRA、IROS等国际权威学术期刊和会议发表高水平论文200余篇;授权专利100余项;获得陕西省自然科学一等奖、陕西省技术发明一等奖和国防技术发明二等奖等多项;课题组围绕国家重大战略需求和国际技术前沿,坚持做具有价值的高水平科研。
文字:王志祥
审核:黄攀峰



 官方微信
官方微信